

การบรรยายและสาธิตภาคปฏิบัติ
“การพัฒนาและประยุกต์ใช้แผนที่โมเดล 3 มิติ (3D Mapping) ด้วยเทคโนโลยีอากาศยานไร้คนขับ (UAV)”
? ณ ค่ายกำแพงเพชร อัครโยธิน จังหวัดสมุทรสาคร
ในยุคที่ข้อมูลเชิงพื้นที่ (Geospatial Data) กลายเป็นหัวใจสำคัญของการวางแผนและการตัดสินใจ เทคโนโลยีอากาศยานไร้คนขับ หรือ UAV ได้เข้ามามีบทบาทสำคัญในการยกระดับการสำรวจพื้นที่ให้มีความแม่นยำ รวดเร็ว และสามารถนำไปใช้งานได้จริงในหลากหลายภารกิจ การบรรยายและสาธิตภาคปฏิบัติในครั้งนี้ ถูกจัดขึ้นเพื่อถ่ายทอดองค์ความรู้ด้านการพัฒนาและประยุกต์ใช้แผนที่โมเดล 3 มิติ (3D Mapping) โดยเน้นการเชื่อมโยง “เทคโนโลยี” เข้ากับ “การใช้งานจริง” อย่างเป็นระบบ ตั้งแต่ต้นทางจนถึงปลายทางของกระบวนการทำงานครบกระบวนการตั้งแต่การวางแผน ถึงการสร้างโมเดล
เนื้อหาการสาธิตครอบคลุม Workflow สำคัญของงานสำรวจด้วยโดรน ตั้งแต่
- การวางแผนการบิน (Flight Planning) ให้เหมาะสมกับลักษณะพื้นที่
- การเลือกอุปกรณ์และประเภทโดรนให้ตรงกับภารกิจ
- การเก็บข้อมูลภาพถ่ายทางอากาศ (Aerial Data Acquisition)
- การประมวลผลข้อมูลเพื่อสร้าง Orthophoto และ 3D Model
- การนำข้อมูลไปใช้งานเชิงพื้นที่ (Spatial Application)

ผู้เข้าร่วมจะได้เห็นภาพรวมของกระบวนการทั้งหมดอย่างชัดเจน และเข้าใจว่า “ข้อมูลที่ได้จากโดรน” สามารถต่อยอดไปใช้งานจริงได้อย่างไร
สาธิตการใช้งานโดรนในภารกิจจริง
หนึ่งในจุดเด่นของกิจกรรมครั้งนี้ คือการสาธิตการใช้งานโดรนในสถานการณ์ที่ใกล้เคียงกับการปฏิบัติงานจริง โดยเลือกใช้แพลตฟอร์มที่ตอบโจทย์ภารกิจที่แตกต่างกัน ได้แก่
Multirotor Drone — ความแม่นยำสูงสำหรับงาน Mapping
โดรนแบบ Multirotor ถูกนำมาใช้สำหรับงานทำแผนที่ 2D และ 3D ที่ต้องการความละเอียดสูง เหมาะสำหรับการเก็บข้อมูลพื้นที่เฉพาะจุด เช่น พื้นที่โครงการก่อสร้าง พื้นที่ชุมชน หรือพื้นที่ที่ต้องการรายละเอียดเชิงลึก

Single Rotor — ครอบคลุมพื้นที่กว้าง ระยะไกล
โดรนแบบ Single Rotor เหมาะสำหรับภารกิจลาดตระเวนหรือสำรวจในพื้นที่ขนาดใหญ่ สามารถบินได้ระยะไกลและต่อเนื่อง พร้อมรองรับระบบตรวจจับอัตโนมัติ ช่วยเพิ่มประสิทธิภาพในการเฝ้าระวังและติดตามสถานการณ์

ระบบโดรนอัตโนมัติ พร้อม Dock 3 — เฝ้าระวังแบบต่อเนื่อง
การนำระบบโดรนอัตโนมัติร่วมกับ Dock Station เข้ามาใช้ ช่วยให้สามารถปฏิบัติงานได้แบบต่อเนื่องโดยไม่ต้องพึ่งพาการควบคุมตลอดเวลา รองรับการบินอัตโนมัติ การตรวจจับแบบ Real-time และการส่งข้อมูลกลับศูนย์ควบคุม
ระบบลักษณะนี้ถูกออกแบบมาเพื่อรองรับงานเฝ้าระวังและตรวจสอบพื้นที่ระยะยาว โดยสามารถตั้งภารกิจล่วงหน้าและทำงานซ้ำได้อย่างแม่นยำ
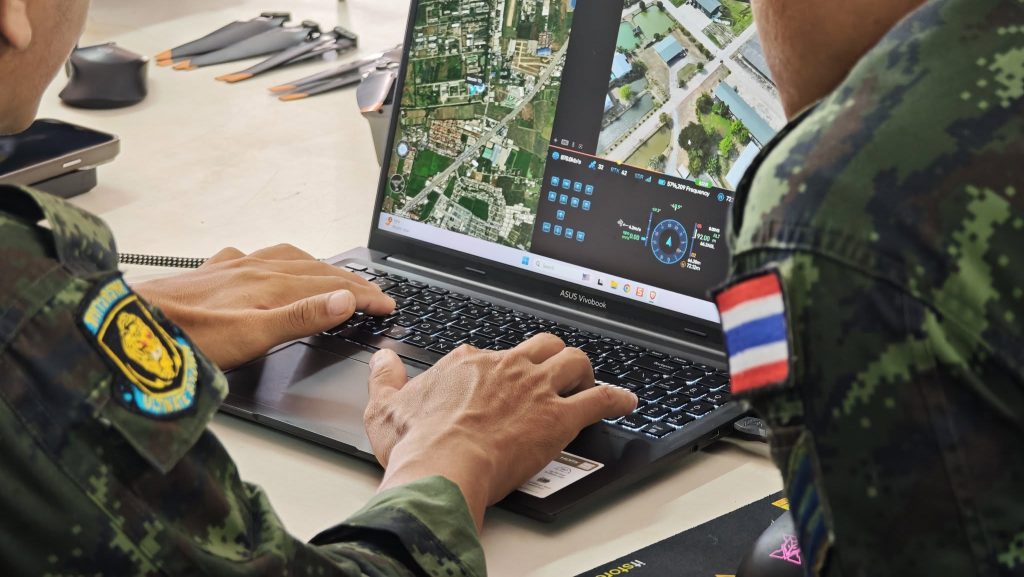
จากข้อมูลภาพ สู่เครื่องมือในการตัดสินใจ
ผลลัพธ์ของการทำ 3D Mapping ไม่ได้จบอยู่แค่ “ภาพสวย” หรือ “โมเดล” เท่านั้น แต่คือการเปลี่ยนข้อมูลภาพถ่ายให้กลายเป็นข้อมูลเชิงวิเคราะห์ที่สามารถนำไปใช้ได้จริง เช่น
- การวางแผนพัฒนาโครงการ
- การตรวจสอบความคืบหน้าของงานก่อสร้าง
- การประเมินพื้นที่และทรัพยากร
- การบริหารจัดการพื้นที่ในระดับองค์กรหรือหน่วยงาน
การมีข้อมูล Orthophoto และ 3D Model ที่มีความแม่นยำสูง ช่วยให้การตัดสินใจมีความชัดเจน ลดความคลาดเคลื่อน และเพิ่มประสิทธิภาพในการทำงานในระยะยาว
สรุป
กิจกรรมในครั้งนี้สะท้อนให้เห็นถึงศักยภาพของเทคโนโลยี UAV ในการยกระดับงานสำรวจและการจัดการข้อมูลเชิงพื้นที่อย่างเป็นระบบ
จากการบรรยายสู่การลงมือปฏิบัติจริง ผู้เข้าร่วมไม่ได้เพียงแค่เห็นว่าเทคโนโลยีทำอะไรได้
แต่เข้าใจว่า “จะนำไปใช้ให้เกิดประโยชน์สูงสุดได้อย่างไร”
ซึ่งนี่คือก้าวสำคัญของการนำเทคโนโลยีโดรนไปสู่การใช้งานจริงในระดับองค์กรและภารกิจภาคสนามอย่างแท้จริง







